{kind=link}

Os alunos do 4.° semestre do curso de Engenharia de Computação apresentaram, na manhã da última sexta-feira, 11 de novembro, o Projeto Lançador Eletrônico. Organizado pelos professores do curso Luís Fernando Pompeo Ferrara e Raquel Galhardo, o projeto tinha como objetivo fazer com que os estudantes construíssem um propulsor para o lançamento de bolinhas. Eles poderiam utilizar elementos de força elástica, pressão, entre outros, para o disparo. A atividade aconteceu no pátio do bloco M1, ao lado do InovFabLab.
Com a ajuda dos docentes Kelly Cristina e Yuri Storino, os protótipos começaram a ser construídos no começo do semestre, nas aulas de projeto de sistemas integrados, ministradas pelos professores Luís Fernando e Raquel. Nelas, os alunos puderam organizar a estrutura dos seus projetos. Os alunos tiveram o auxílio do InovFabLab para a montagem dos protótipos.

Com a presença contínua de materiais como canos de PVC, mdf e Arduinos, para a montagem dos canhões, os alunos tinham que disparar as bolinhas por meio de um controle, que poderia ser feito manualmente, mas o seu meio de lançamento deveria ser eletrônico, ou seja, por intermédio de um joystick ou controle de vídeo game.
“A intenção maior é eles terem essa dinâmica para trabalhar em grupo e juntar os conhecimentos passados em outras disciplinas, como eletrônica, física, mecânica e programação”, explica a docente Raquel.
Com um modelo inédito de disputa, este evento já havia sido realizado em anos anteriores, porém com regras diferentes e meios de montagens dos protótipos. Nas edições passadas, os lançadores eram produzidos por meios manuais e não ligados à parte mecânica, em que o disparo não dependia do posicionamento eletrônico.
“A ideia foi evoluir (para) um que agregasse mais elementos, no caso, toda essa parte de eletrônica, disparo e posicionamento”, destaca o coordenador do curso de Engenharia de Computação, Luís Fernando Ferrara. E completa a professora Raquel: “Sinto-me satisfeita, pois é a oportunidade de eles colocarem todo o seu conhecimento em prol de um projeto”.

O campeonato – Com 16 alunos participando da atividade, cada um dos quatro grupos teve a oportunidade de realizar cinco disparos, sendo dois deles de testes e os outros três valendo pontos.
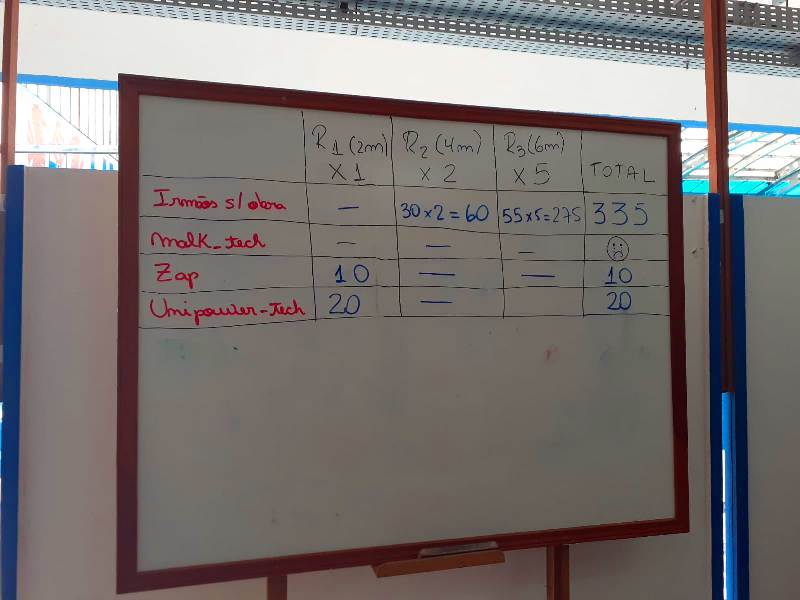
Para computar os pontos obtidos pelos grupos, criou-se um painel alusivo, todo de madeira, com várias referências a nomes de planetas, em que foram inseridos vários buracos com pontuações diferentes para eles. Quanto maior o buraco, menor a pontuação e vice-versa. Foram disputadas três rodadas, com distâncias diferentes para o disparo, de 2, 4 e 6 metros.
De acordo com o coordenador do curso de Engenharia de Computação, quanto maior for o disparo, maior a força e melhor a precisão, ou seja, a possibilidade que o canhão tem de mudar de posição, seja para cima ou para baixo, e realizar uma trajetória sem interferências e chegar às distâncias maiores. Já para os tiros curtos, continua o coordenador, um tiro reto pode resolver o problema. “São mais os conceitos de física, para posicionar e disparar melhor as bolinhas”, explica Luís Fernando.

A organização do Projeto Lançador Eletrônico consistia em somar os pontos ganhos pelos disparos certeiros. Assim, aquele que somasse o maior número de pontos, ao final das três rodadas, seria declarado o vencedor. Futuramente, será realizada uma premiação alusiva, com outros projetos organizados pelo curso de Engenharia de Computação.
Este lançador, sobretudo, vale como nota da P1 e P2. Aqueles que não conseguirem nota suficiente ou o protótipo não funcionar no dia do disparo, será necessário reapresentá-lo e este novo trabalho valerá como nota de P3 ou exame.
Os grupos e os desempenhos no Projeto Lançador Eletrônico
Os vencedores – O grupo intitulado “Irmãos s/obra”, composto pelos alunos Murilo Braz, Mateus Malheiros, Felipe Santana e Gabriel Mendes, foi o maior pontuador do torneio, com 335 pontos. Murilo confessa o nervosismo antes do momento do disparo dos ‘canhões’, uma vez que existia o temor de que o seu lançador não funcionasse. O nervosismo, entretanto, foi diluído pelos acertos dos disparos.

Seu ‘canhão’ tem um servo, motor que dá a tração e a direção necessárias para o disparo, que está preso no suporte feito de PLA, material feito em 3D, que levanta o suporte e o cano de lançamento. Existia também outro servo, que não foi possível utilizar. Este, por sua vez, estava preso na parte de trás do motor e fazia-o girar de um lado para o outro.
“(Em razão de um problema) de ontem, resolvemos não utilizar. E tem um último servo, lá atrás, que está preso, por um elástico, no náilon, que, na hora em que o servo gira, o náilon solta e efetuamos o disparo”, explica Murilo, em relação à montagem do seu disparador.
Já a dica para a inserção de um encoder dentro dos lançadores foi feita pelo professor Ferrara. Encoder é um sensor que converte um movimento mecânico angular ou linear em uma série de pulsos analógicos ou digitais elétricos.
Segundo Murilo, o docente pediu para que o aluno estudasse um pouco mais sobre o gerador de pulsos e testasse-os com LEDs, para medir a sua a potência. “Foi algo bem mais fácil de usar, do que um potenciômetro”, complementa o aluno.

Vice-campeões – Henrique Duarte, Neemias Vieira, Isadora Bastos e Willian Suyama formaram o grupo UniPower_Tech, que obteve 20 pontos ao final dos disparos. A maior dificuldade do grupo, conforme Henrique, foram com os roletes.
“Nós movimentamos ele com dois motores, tanto para direita, quanto para a esquerda, como para cima e para baixo, com controle remoto. Para o lançamento em si, ele funciona com dois motores em cada lado do cano, que pressionam a bolinha, inserida no projeto e lançada para frente”, resume o estudante Henrique Duarte, com relação ao funcionamento e execução do seu projeto.
Terceiro lugar – A equipe, formada pelos alunos Leonardo Montagnaro de Ramos Valim, Leonardo Raposo Rocha, Vitor Faria e Gustavo Lech, somou 10 pontos e ficou com a terceira posição no torneio. Nomeado de “Zap”, os componentes saíram satisfeitos com o desempenho do ‘canhão’ no momento dos disparos.

“Temos o Arduino, que controlou a parte mecânica, e temos dois servos motores, que aguentam até 15 quilos para poder mexer no protótipo horizontal e verticalmente. Dois motorzinhos que ficam rodando e mexem as roldaninhas, lá dentro, para disparar a bolinha”, explica o aluno Léo Valim sobre a montagem do seu protótipo. “Além de um cano de PVC e mdf de 3mm, de que é feita a caixa, o projeto em si”, completa o companheiro de grupo, Leonardo Raposo.
Com a presença dois potenciômetros, responsáveis pela orientação da trajetória da bolinha, este botão fazia com que os motores começassem a girar. A partir de então, bastava deixar a bolinha lá no topo para que ela fosse disparada.
“A parte de programação e mecânica é muito importante para o curso e o nosso desenvolvimento pessoal. Vai viabilizar com que muitas das nossas ideias possam ser retiradas do papel e colocadas, realmente, na prática”, destaca o aluno Leonardo Valim.
Quarto lugar – O grupo Malk_Tech, composto pelos alunos Kauê Sabino, Vitor Sales, Larissa Andrade e Alec Yagi, notaram que, a despeito de terem seguido à risca o planejamento, viram seu protótipo falhar na hora dos disparos.

A maior dificuldade do grupo, relata Kauê, foi em relação ao desenvolvimento do tiro automático. Eles tinham feito o corte do cano da forma correta e imaginavam soltar os disparos por presilhas, porém perceberam que essa não era uma ideia adequada.
No protótipo do grupo, existia uma plataforma dentro do plano, em que ela faz o apoio da bolinha usada para o disparo. Foi inserido um pino dentro do cano, sendo este um parafuso. Assim, abriu-se um buraco nele, para esse pino ficar para cima e o servo liberá-lo para o disparo. Até então, estava funcionando. “Ontem, fizemos os últimos testes, para dar uns ajustes, mas, chegou aqui, o servo infelizmente travou”, lamenta Kauê, aluno do curso de Engenharia de Computação.
A professora Raquel e outros do curso acompanharam o desenvolvimento dos projetos, auxiliando-os com opiniões e dicas. “Você não pode fazer tudo às cegas, é preciso ter uma base. Os professores, no meu grupo, eles atenderam o que a gente correspondeu e o que não entendemos, perguntamos, para sanar as dúvidas”, ressalta o aluno.

Para a montagem, utilizaram-se materiais, como mdf, cano de PVC e um eixo no meio e outro na parte interna do projeto. Um eixo impresso em 3D, que foi encaixado no servo e preso na parte redonda, para fazer o giro horizontal. Existia ainda o Arduino e o varão, presos com o cano, além de elásticos e outra parte com mdf, com os parafusos prendendo na frente do canhão.
“A gente puxa aquela base. Tem o pino central, dentro daquela base, prendemos aquele pino no buraco. Aquele servo ali em cima tem a função de baixar esse pino. Assim, ocorre o disparo”, disseca Kauê, sobre o manuseio do seu disparador.
Por fim, o aluno compartilha que projetos como esses servem como testes para o mercado de trabalho. “De uma falha, você não perde 100%, mas sim reaproveita”, finaliza Kauê.